
中国科学院发表人工智能机器人最新Cell论文
来源:生物世界 2025-08-14 11:02
在这项最新研究中,研究团队通过将基因组编辑技术与基于人工智能的机器人相结合,研制了世界首台可自动巡航杂交授粉的智能育种机器人——“吉儿”(GEAIR),首次提出了作物-机器人协同设计策略。
人工智能(AI)和机器人在向精准农业转型方面提供了巨大机遇,有助于提高农作物产量、降低成本并促进可持续发展。然而,许多农作物的特性阻碍了基于人工智能的机器人技术的应用。其中一个瓶颈在于花朵形态,其柱头凹陷,这妨碍了杂交育种过程的去雄和授粉。
2025 年 8 月 11 日,中国科学院遗传与发育生物学研究所许操团队联合中国科学院自动化研究所的研究人员(谢跃、张廷浩、杨明浩为论文共同第一作者)在国际顶尖学术期刊 Cell 上发表了题为:Engineering crop flower morphology facilitates robotization of cross-pollination and speed breeding 的研究论文。
该研究将生物技术 + 人工智能(BT + AI)深度融合,首次提出作物-机器人协同设计(Crop-robot co-design)理念,通过基因编辑重新设计作物花型,快速精准创制“机器人友好”的结构型雄性不育系,运用深度学习和人工智能成功研制世界首台可自动巡航杂交授粉的智能育种机器人——“吉儿”(Genome Editing combined with AI-based Robotics,GEAIR),打破杂交育种和制种瓶颈,大幅降低育种成本、缩短育种周期、提高育种效率。
在这项最新研究中,研究团队通过将基因组编辑技术与基于人工智能的机器人相结合,研制了世界首台可自动巡航杂交授粉的智能育种机器人——“吉儿”(GEAIR),首次提出了作物-机器人协同设计策略。
研究团队利用基因组编辑技术重新设计作物花型,培育出了雄性不育的番茄植株,其花朵具有外露的柱头,然后训练了一个基于人工智能的移动机器人 GEAIR,使其能够自动识别并给这些柱头授粉。GEAIR 能够实现自动化 F1 杂交育种,其效率可与人工授粉相媲美,并且在速生育种条件下与从头驯化相结合时,有助于快速培育出抗逆性强且风味佳的番茄。此外,研究团队还在大豆中通过多重基因组编辑重现了雄性不育、花朵柱头外露的表型,这有可能开启机器人杂交育种的新局面。
该研究的亮点:
对 ABC 模型基因进行基因组编辑可使番茄和大豆产生雄蕊外露的雄性不育花型;
AI 驱动的机器人实现了异花授粉的自动化,并简化了机器人杂交育种的流程;
将生物技术与基于 AI 的机器人相结合,突破了作物快速育种的瓶颈;
作物-机器人协同设计策略为可持续精准农业提供了解决方案。
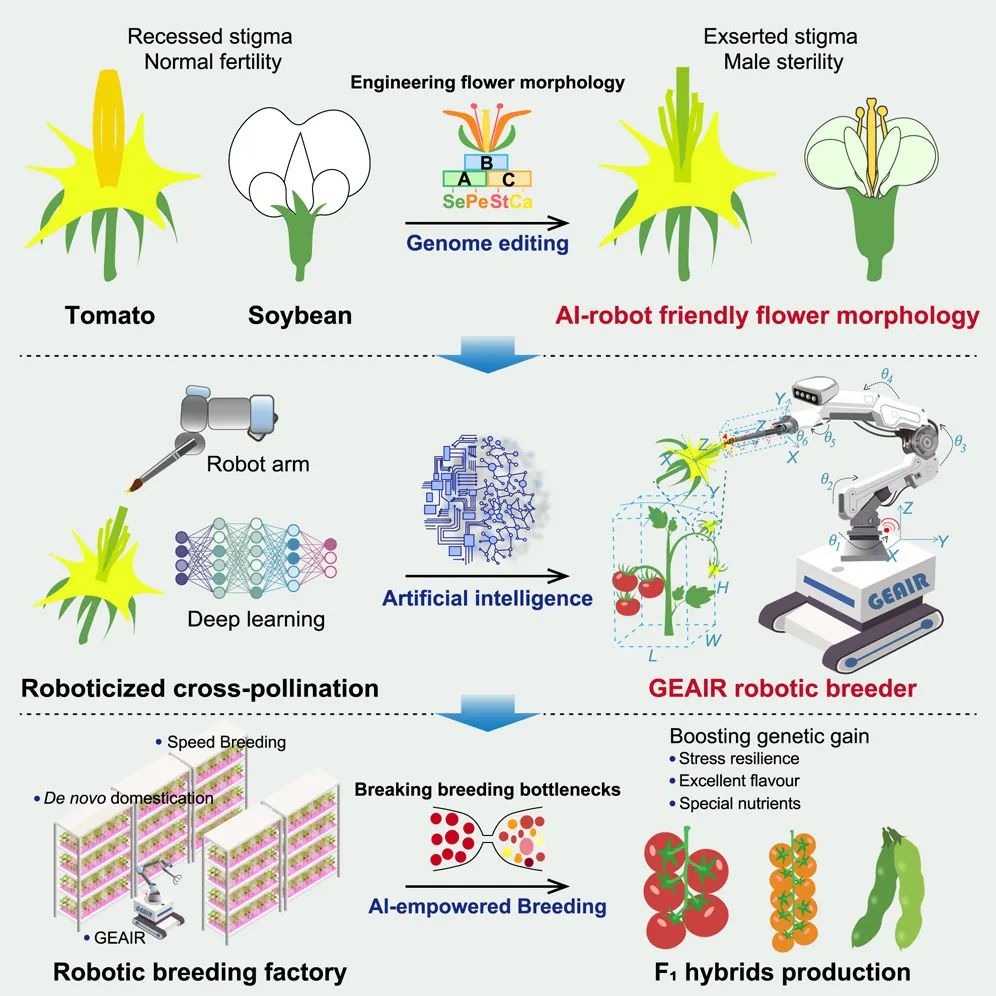
总的来说,该研究展示了 GEAIR 在通过自动化、更快速地培育气候适应型作物来提高效率和降低成本方面的潜力。
版权声明 本网站所有注明“来源:生物谷”或“来源:bioon”的文字、图片和音视频资料,版权均属于生物谷网站所有。非经授权,任何媒体、网站或个人不得转载,否则将追究法律责任。取得书面授权转载时,须注明“来源:生物谷”。其它来源的文章系转载文章,本网所有转载文章系出于传递更多信息之目的,转载内容不代表本站立场。不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
