
Nature子刊:中美三校合作,开发用于远程操控食欲的口服软体机器人
来源:生物世界 2024-08-10 10:07
这项研究展示了一种概念性的软体机器人(IngRI),用于实现胃肠道的可吞服、无线电刺激。离体和体内测试均表明,该软设备架构比现有的刚性电刺激装置具有更好的电极组织接触和更长的胃滞留时间。I
近日,浙江大学南科望研究员联合香港城市大学于欣格教授和麻省理工学院Giovanni Traverso教授,在 Nature Communications 期刊发表了题为:An ingestible, battery-free, tissue-adhering robotic interface for non-invasive and chronic electrostimulation of the gut 的研究论文。
该研究另辟蹊径,寻求运用非药物、无创、可远程操控的方法来调节活体内的胃饥饿素水平,团队合力研发了一款可吞服、无电池、组织粘附的软体机器人(IngRI)用于非侵入性的胃部电刺激,并在成年猪体内实现了胃饥饿素水平的调节。
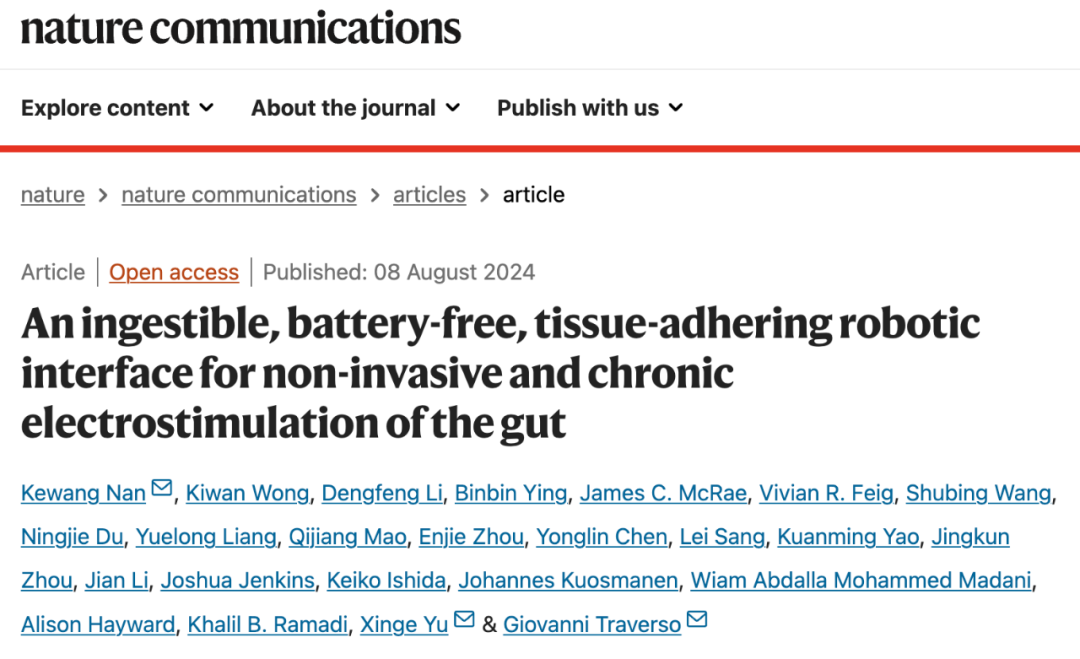
该研究展示了一个创新的可吞服软体机器人(IngRI),它是一种设计用于在消化道内进行无线长期电刺激的设备(图1)。IngRI最初被封装在一个明胶胶囊中,当胶囊进入肠道后,它会溶解并释放出折叠的IngRI。一旦释放,IngRI可以利用外部手持磁铁的帮助,在肠道中导航至所需的位置,特别是胃部。
到达目标位置后,IngRI利用仿生水凝胶的粘附作用,牢固地附着在胃粘膜上,确保设备的稳定性和适形电极与组织的有效接触。通过近场感应耦合,IngRI能够提供可编程的电脉冲,用于刺激胃肠道中具有电兴奋性的细胞,以达到治疗的目的。这种设备的设计克服了传统可摄入电刺激设备的一些限制,如电极与组织接触不良和电池寿命有限,为胃肠道疾病的治疗提供了新的可能性。
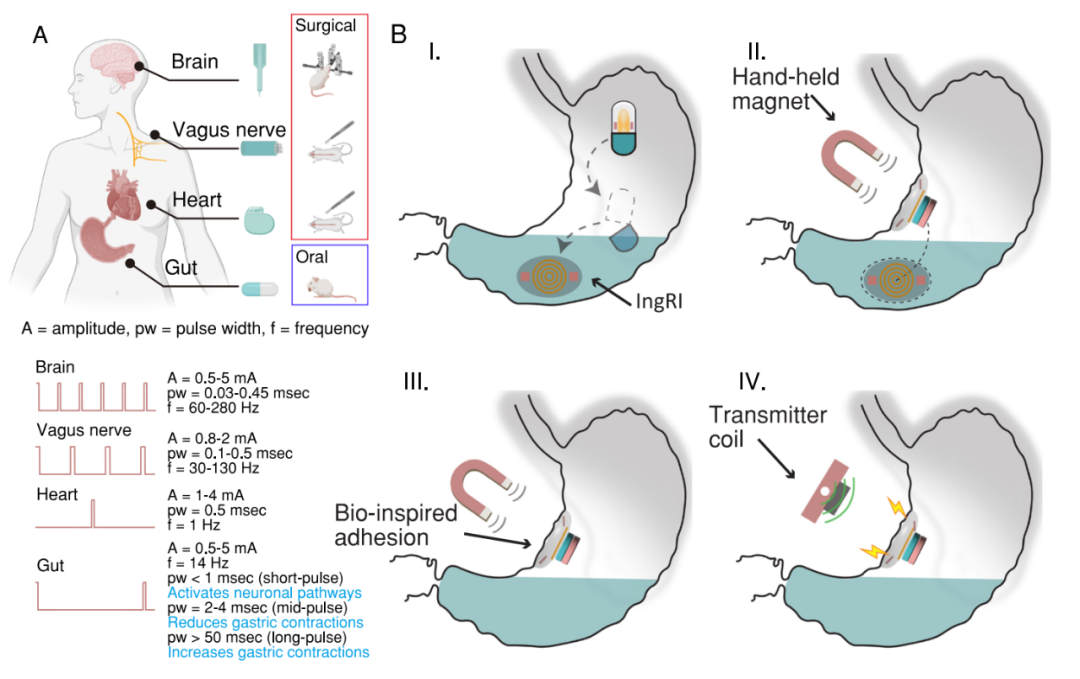
图1. 可吞服软体机器人设计
研究团队详细探究了IngRI的多层结构设计及其柔韧性和适应性(图2)。IngRI采用了多层设计,并通过光学图像展示了其折叠后安装在明胶胶囊内的状态,以及其变形后的柔韧性。为了研究IngRI的接触和刺激特性,团队进行了落下测试,其中IngRI连接到接收器线圈,接收器线圈从发射器线圈接收无线电力,并连接到示波器以显示不同受控参数下的输出电压。实验结果表明,具有较小刚度的IngRI在落到潮湿或干燥的猪胃组织上时,输出电压较高且误差较小。光学图像进一步显示了刚性和软性版本的IngRI在落下后与胃组织接触的情况。此外,研究团队还探讨了不同电极材料和配置对输出电压的影响。使用凝胶作为接触界面的电极显示出更好的波形保真度,而不同电极面积的测试表明,输出电压与接触面积成反比。这些发现不仅展示了IngRI在设计和功能上的创新,还为其在医学领域的应用提供了重要的理论依据和实验支持。
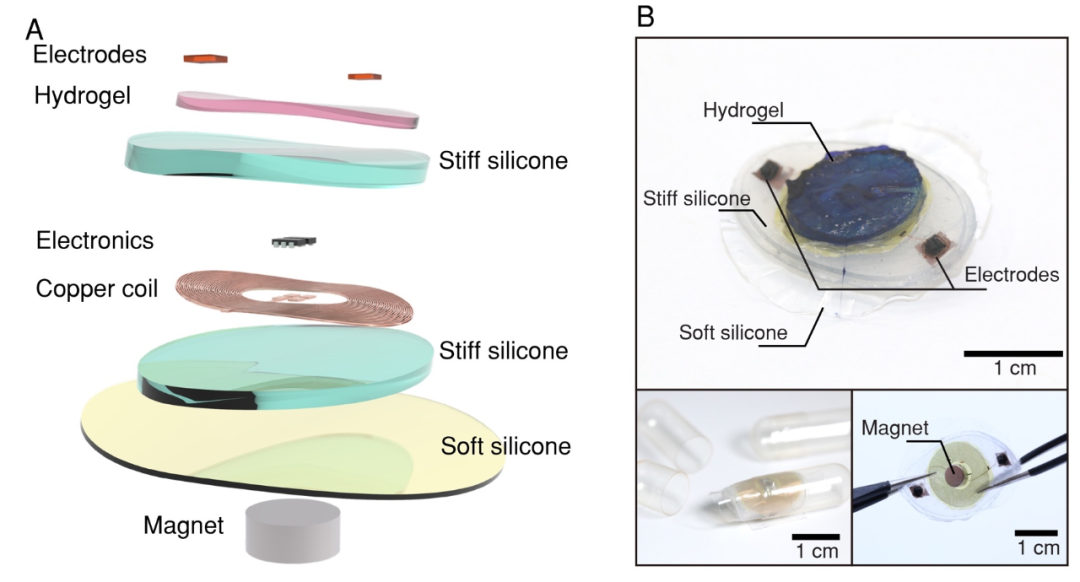
图2. 机器人的柔韧性和适应性展示
接下来,研究团队通过使用外部手持式磁铁模拟IngRI体内导航,进行了体外装置的实验,并展示了相关的光学图像。实验结果表明,IngRI在不同方向和湿度条件下的最小驱动距离具有显著差异,这些数据对于优化其导航性能至关重要。此外,IngRI在体内成功展示了其卓越的导航和翻转能力。为了增强IngRI在胃内的停留时间,研究团队设计了一种仿生水凝胶粘合剂。该粘合剂通过软硅胶盘和冻干水凝胶的双层结构,提供了物理和化学粘附的结合,能够有效应对胃内苛刻的环境。实验数据显示,加入软硅胶盘或冻干水凝胶后,IngRI的平均剥离力在第0天显著增加,且在第7天使用仿生水凝胶粘合剂后,剥离力仍然保持较高水平。进一步的研究通过射线照片跟踪了带有仿生水凝胶粘合剂的IngRI在猪胃中的停留情况(图3)。结果显示,在摄入48小时后,七分之五的装置完好无损,证明了其在体内的稳定性和持久性。
图3. 机器人在猪胃内的导航和生物粘贴
为实现器件的无线供能,研究团队展示了将脉冲波转换为高频脉冲串以便无线传输到接收器线圈的过程(图4)。这种创新设计显著提升了无线传输的效率和稳定性。进一步的实验研究了不同脉冲宽度(0.33、3和50毫秒)下的代表性输出波形,显示出频率为14Hz、负载电阻为1000欧姆、接收器线圈直径为18毫米的条件下的性能。实验结果表明,不同的负载电阻、入射角、PDMS封装厚度以及磁铁的存在对输出功率与发射器和接收器线圈之间距离的关系有显著影响。
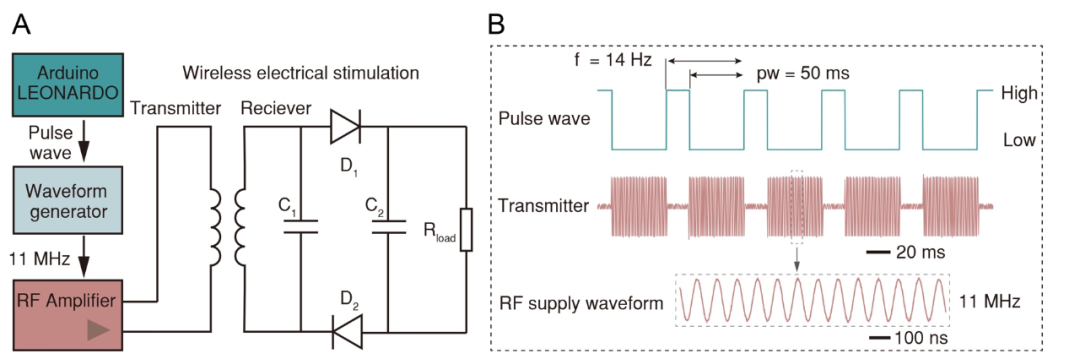
图4. 机器人的无线供能设计
最后,研究团队使用成年猪模型进行了活体实验,通过内窥镜图像展示了IngRI在肠道内对LED设备进行无线供电的能力(图5)。这种无线供电技术证明了IngRI在真实生物环境中的实用性和可靠性。为了进一步验证IngRI的功能,团队测量了其传递的传导信号。实验中,针电极被放置在猪的腹部,检测并记录了相应的波形。结果显示,皮下针电极记录的FSK调制下的不同脉冲宽度波形清晰可见,而对照实验表明无线传输不会干扰皮下记录。此外,研究团队还探讨了在AM调制方案下使用不同输入电压时皮下记录的平均输出电压。实验结果表明,不同输入电压下的输出电压具有显著差异,为IngRI的实际应用提供了重要数据支持。研究团队还测量了使用IngRI刺激的成年猪血浆胃生长激素释放肽水平,并展示了血浆胃生长激素释放肽水平随时间变化的平均倍数变化。
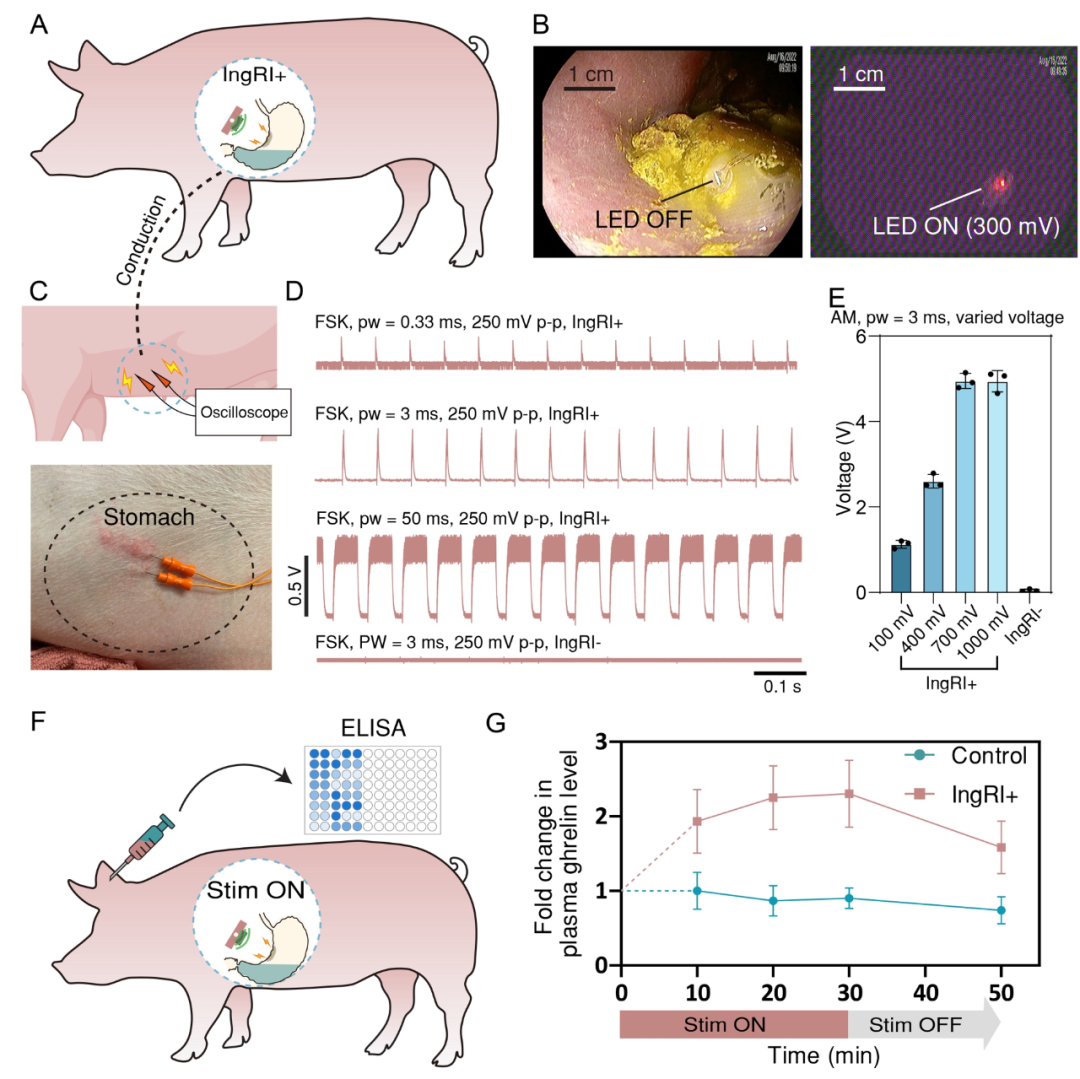
图5. 机器人在成年猪内的活体实验证明能够有效调控血浆生长素释放肽水平
这项研究展示了一种概念性的软体机器人(IngRI),用于实现胃肠道的可吞服、无线电刺激。离体和体内测试均表明,该软设备架构比现有的刚性电刺激装置具有更好的电极组织接触和更长的胃滞留时间。IngRI提供的短脉冲刺激进一步导致血浆胃饥饿素水平增加,可激活生长激素促分泌素受体(GHS-R)并刺激食物摄入和脂肪沉积。这些数据支持通过非药物神经调节调节食欲和治疗其他疾病的潜力。
IngRI的功耗(约为100mW)可以与最近发表在顶级期刊上的各式用于提供机电刺激的可吞服电子设备相媲美,例如STIMS(Science Advances,2020)、RoboCap(Science Robotics,2023)、和FLASH(Science Robotics, 2023)。但后几者均采用电池供电而导致体内危险性增加,并且无法在大型动物模型中驻留超过24小时。
IngRI的一个显著的潜在优势是它能够在完全摄入的同时进行慢性(长达几天)胃刺激。这是通过优化的无线能量传输方案和可远程触发的仿生粘合技术来共同实现的。IngRI创新性的生物粘贴机制使得其胃驻留时长超过48小时,从而可以提供更接近于植入式胃刺激器(当前的临床金标准)的慢性刺激模式来显着提高疗效,同时提高患者接受度并降低成本。
版权声明 本网站所有注明“来源:生物谷”或“来源:bioon”的文字、图片和音视频资料,版权均属于生物谷网站所有。非经授权,任何媒体、网站或个人不得转载,否则将追究法律责任。取得书面授权转载时,须注明“来源:生物谷”。其它来源的文章系转载文章,本网所有转载文章系出于传递更多信息之目的,转载内容不代表本站立场。不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
