
Nature:苏浩团队利用AI模拟训练,提升机器人外骨骼的表现
来源:生物世界 2024-06-19 09:52
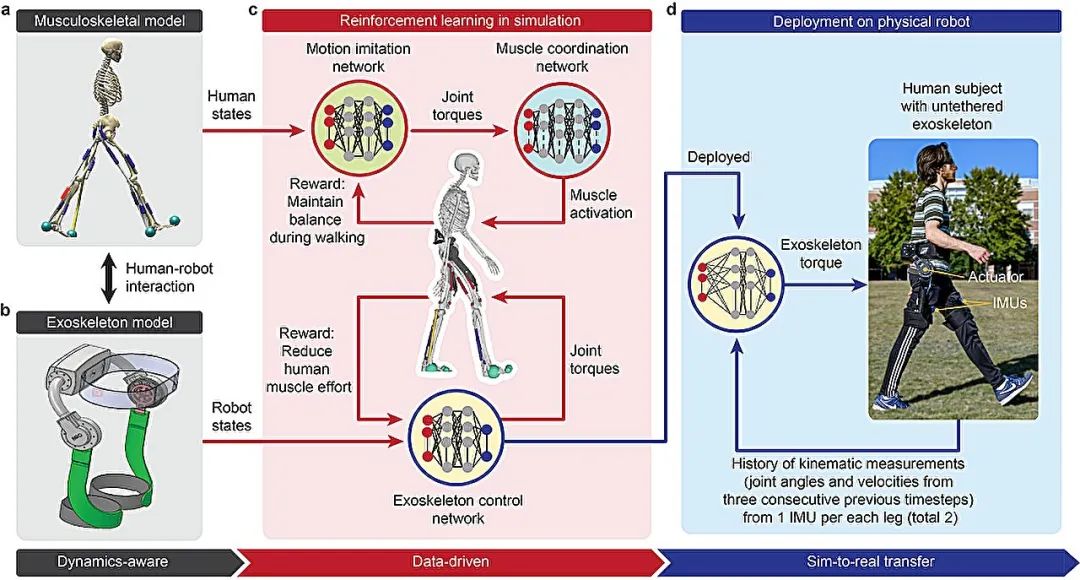
在这项最新研究中,苏浩团队开发了一个能从人类-装置交互中学习的框架,该框架不需要漫长的人体实验和人力资源。他们开发了能在模拟中生成人体运动、肌肉协调和外骨骼控制的三个互联神经网络。
北卡罗来纳州立大学苏浩团队在 Nature 期刊发表了题为:Experiment-free exoskeleton assistance via learning in simulation 的研究论文。
该研究开发了一种利用人工智能(AI)和计算机模拟训练机器人外骨骼的新方法,这种便携式外骨骼中的嵌入式人工智能在计算机模拟中学习如何帮助人们行走、跑步或攀爬,而不需要进行任何实验。该研究或有助于推动外骨骼和义肢等装置的广泛应用。
论文通讯作者苏浩副教授表示,外骨骼技术在改善人类运动能力方面具有巨大的潜力。然而,由于需要进行长时间的人体测试和手工制定控制算法,其发展和广泛应用受到了限制。而这项工作提出并展示了一种新的机器学习框架,该框架在模拟和现实之间架起了桥梁,以自主控制可穿戴机器人,从而改善人类的移动能力和健康状况。
在这项最新研究中,苏浩团队开发了一个能从人类-装置交互中学习的框架,该框架不需要漫长的人体实验和人力资源。他们开发了能在模拟中生成人体运动、肌肉协调和外骨骼控制的三个互联神经网络。

接下来,研究团队使用该模型开展了数百万次模拟试验,该模型能从人体移动数据中学习。为测试他们的控制器在现实世界场景中的成功率,研究团队对一名佩戴髋关节外骨骼的使用者进行了实验,并在使用者进行跑步、走路和爬楼梯这类运动任务时进行监测。最后得到的数据(测量力矩)会显示使用者不同运动形式下的形状变化以及辅助程度。该研究发现,他们的控制器让使用者的代谢率在行走时降低24.3%,跑步时降低13.1%,爬楼梯时降低15.4%,表明整体上控制器能在不同活动中成功协助使用者。
最后,研究团队表示,还需要开展进一步研究拓宽这些控制器的应用范围,从而让辅助外骨骼应用于更多的个体和任务。
版权声明 本网站所有注明“来源:生物谷”或“来源:bioon”的文字、图片和音视频资料,版权均属于生物谷网站所有。非经授权,任何媒体、网站或个人不得转载,否则将追究法律责任。取得书面授权转载时,须注明“来源:生物谷”。其它来源的文章系转载文章,本网所有转载文章系出于传递更多信息之目的,转载内容不代表本站立场。不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
